Seeing some examples of soft robotics in action, they are very curious objects to observe with a natural looking behaviour. After some research using various resources including the soft robotics toolkit, I designed a piece using Rhino.
The piece I designed was the final piece, and so would be used to create a mold to use over and over if necessary.
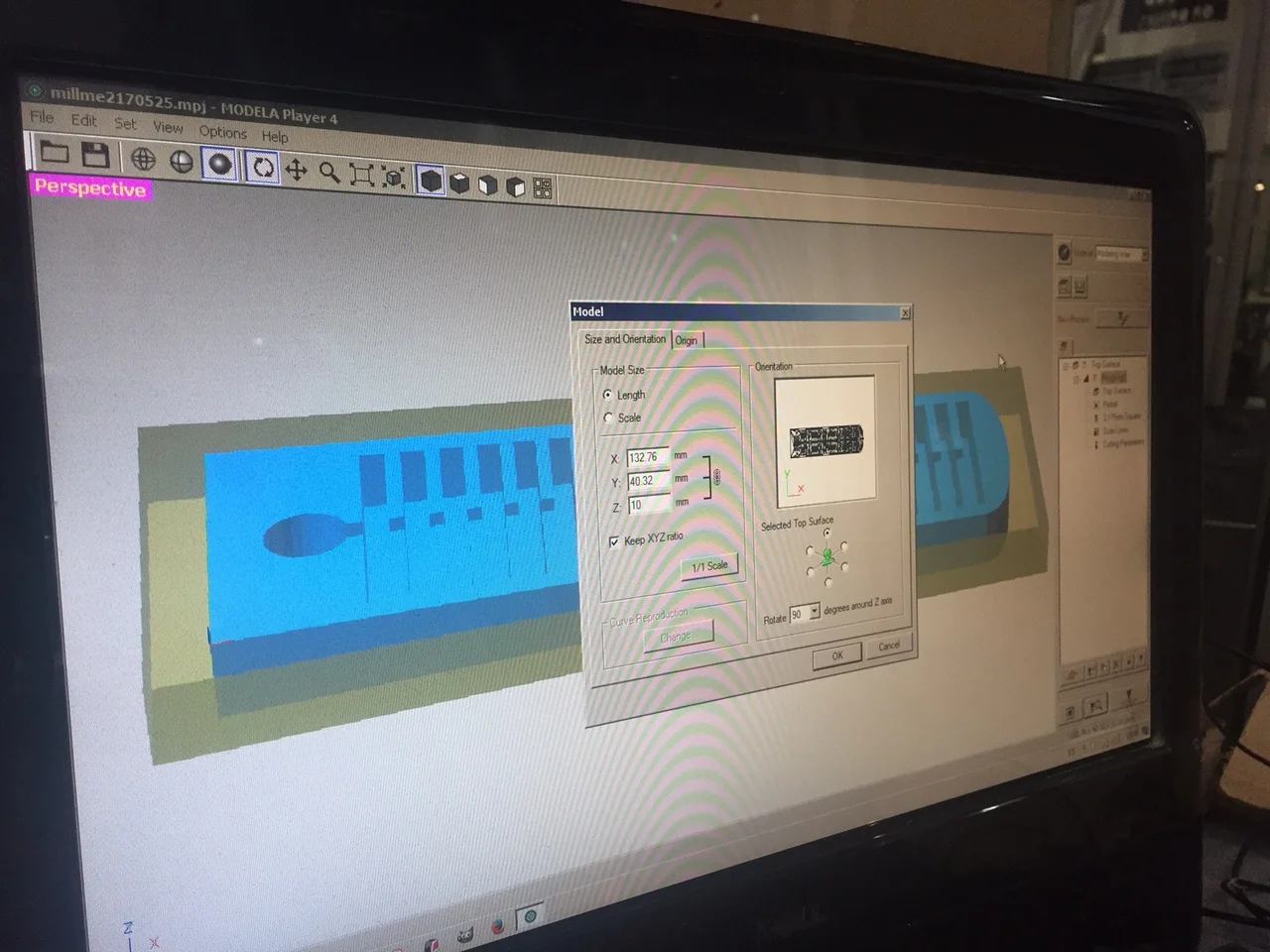
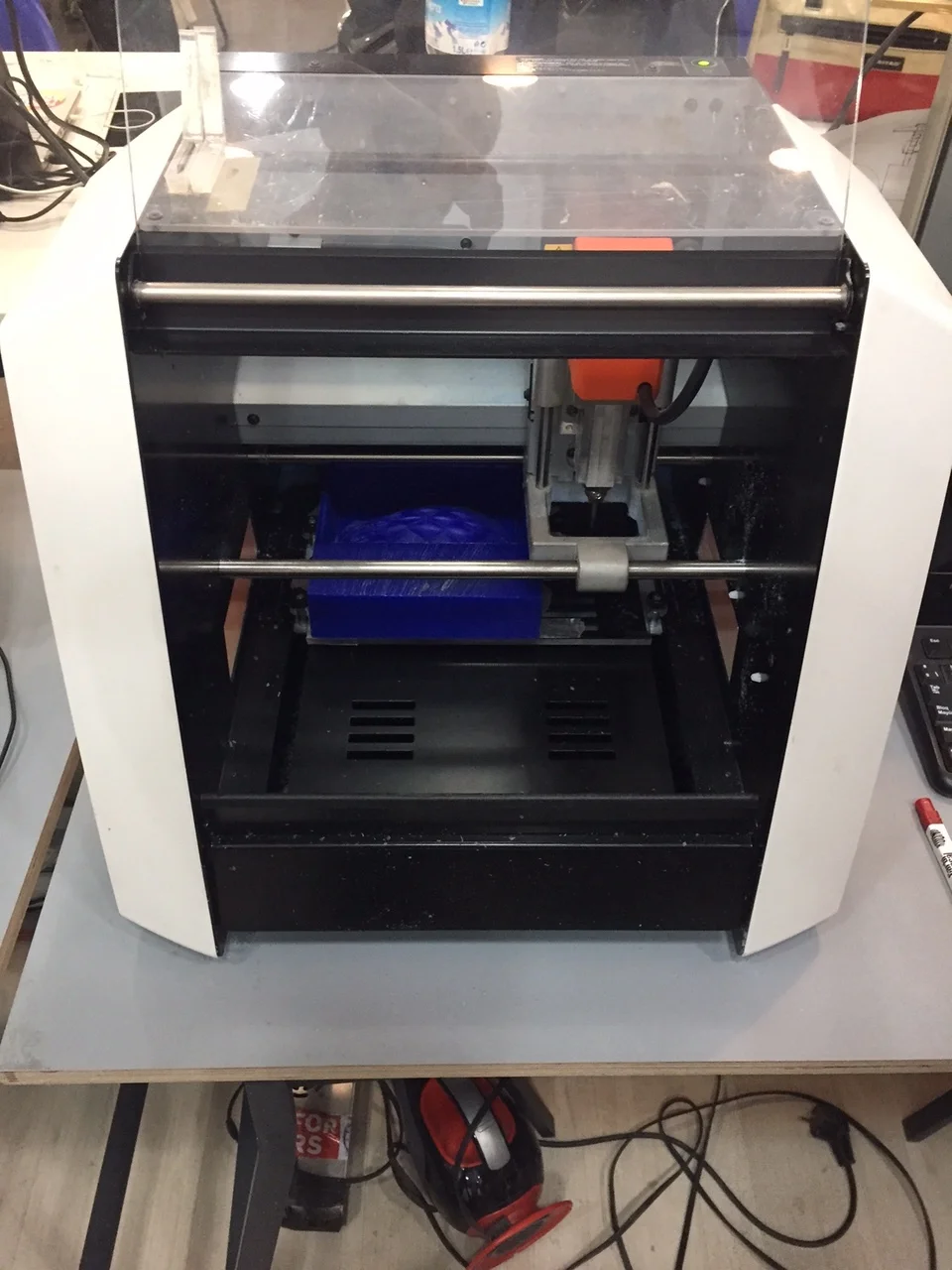
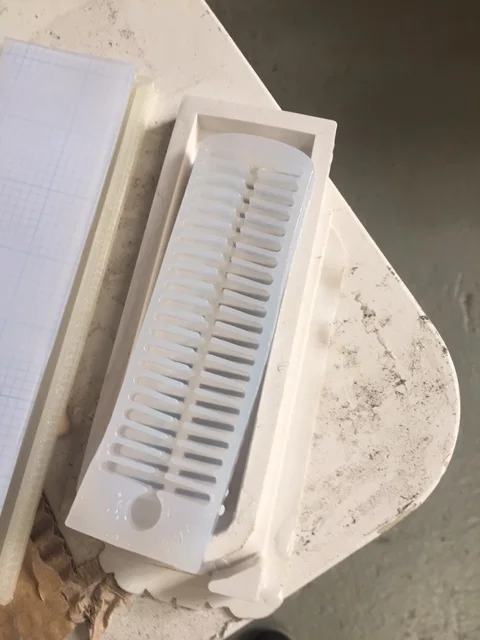
I used the Roland mill, but used a larger drill bit (3mm) at first to remove unnecessary material first (roughing) and then down to a 0.79mm drill bit (finishing) to achieve the detail. I was introduced to a new program called MODELA to create the gcode for the file. This had preset feeds and speeds for the wax material being cut.
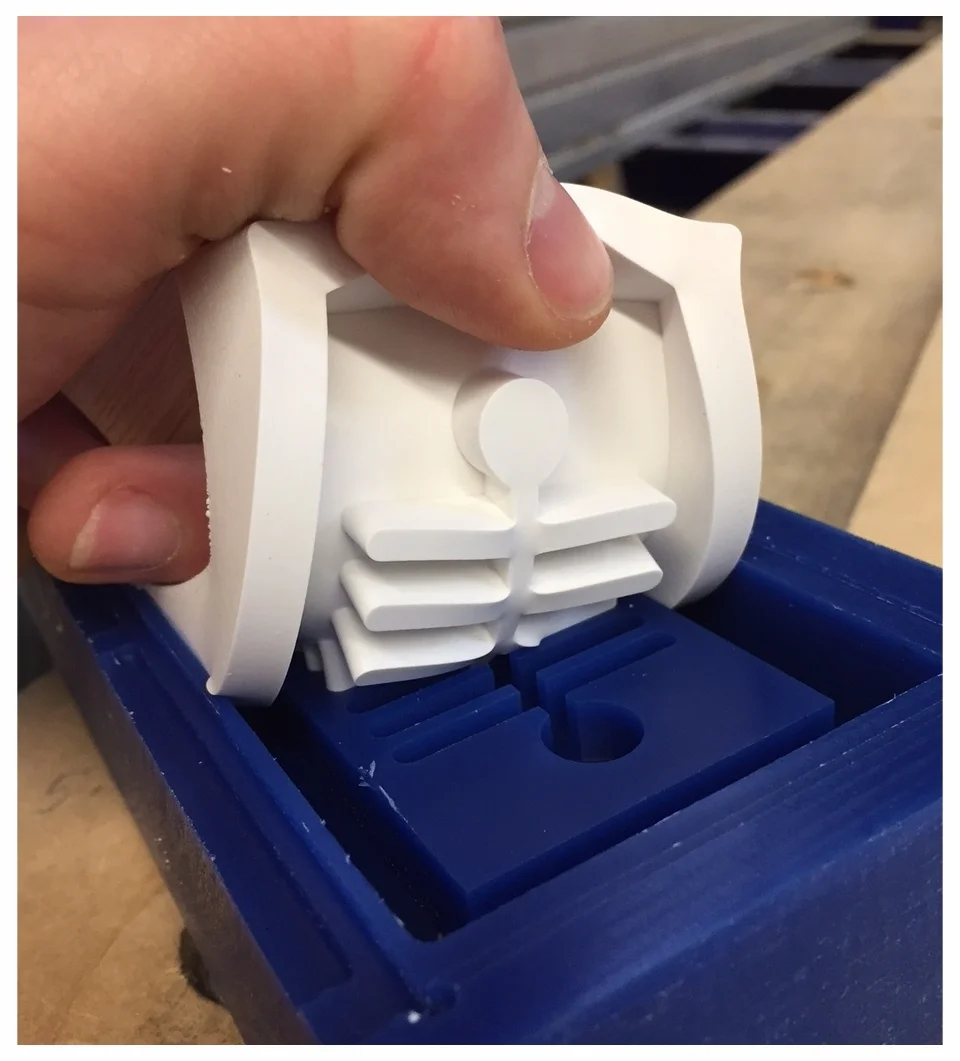
I used white silicon to create the mold for my robot, mixing according to the instructions with the activator and placing in the vaccum chamber to remove the bubbles.
Next was to use the Eco-flex. Using the same technique as the white silicon, I mixed the two halves according to the instructions and placed in the vacuum chamber.
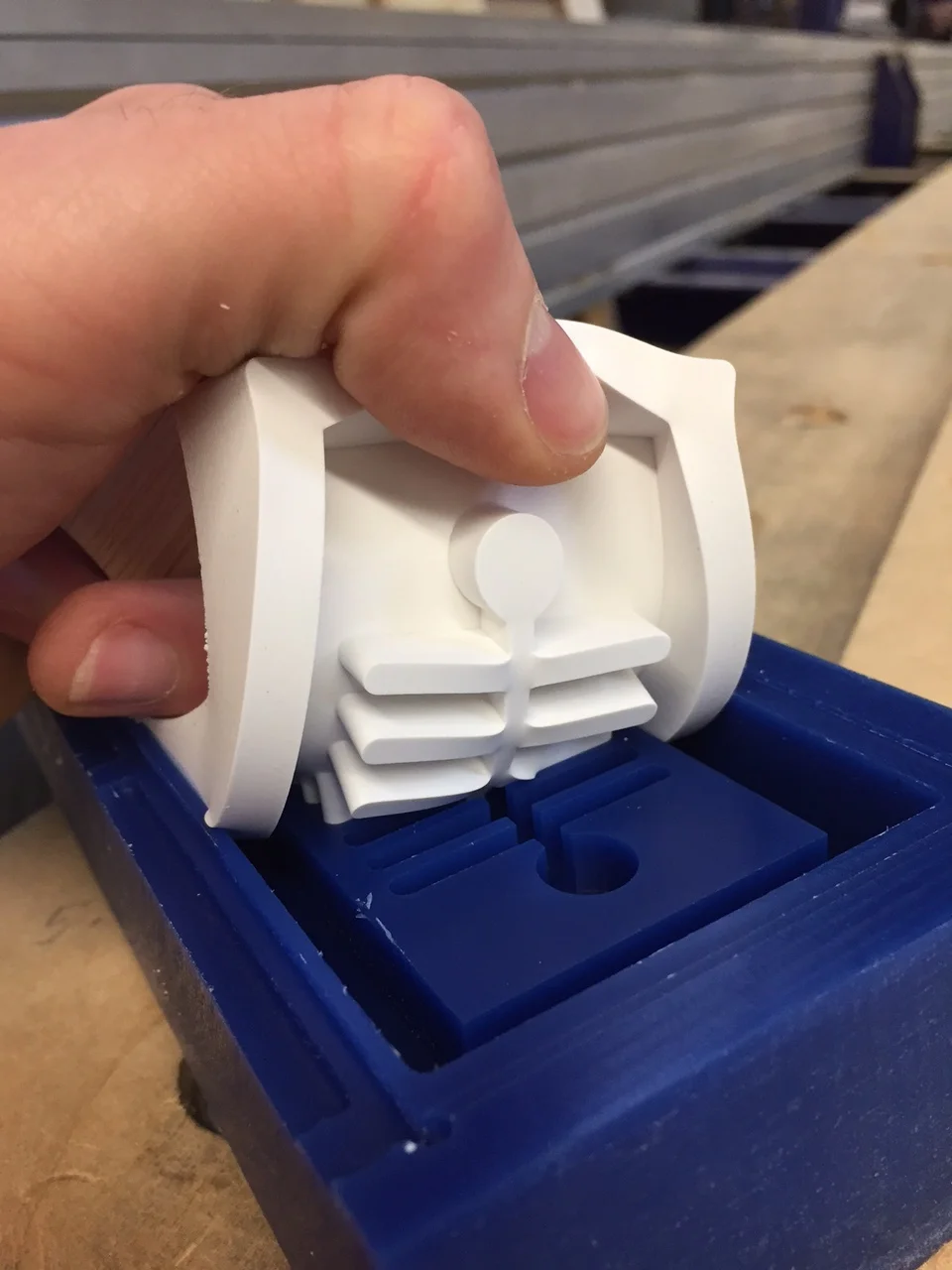
Once the main piece was complete, I joined it to a flat piece that had been created by simply pouring some Eco-flex on a piece of polycarbonate.
Once set, it was time to test, I was very very happy with the result.
More experiments with soft robotics can be found on my FabAcademy page.